기아레이[KIA Ray]자율주행 데모 영상

기아레이[KIA Ray]자율주행 데모 영상
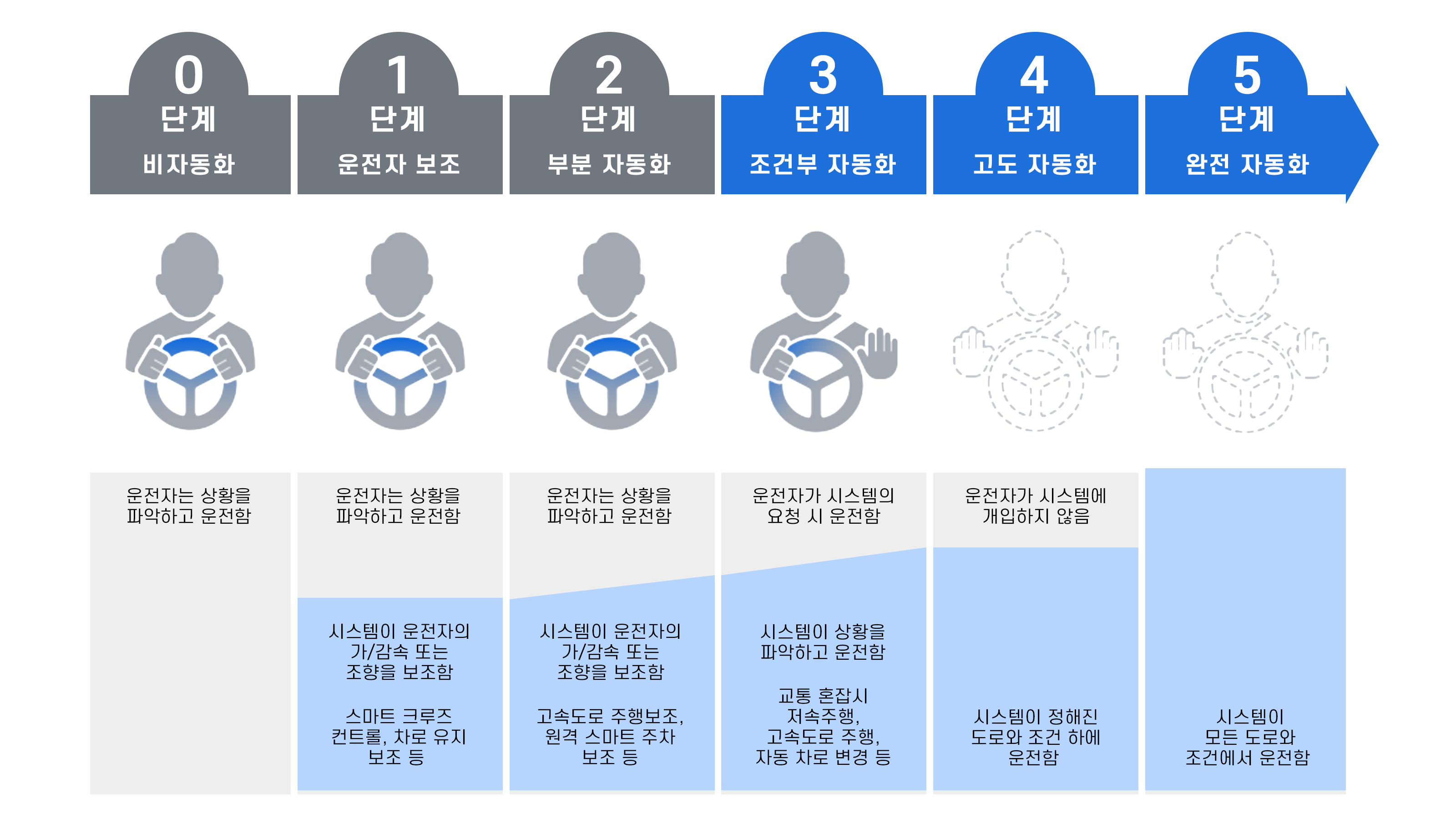
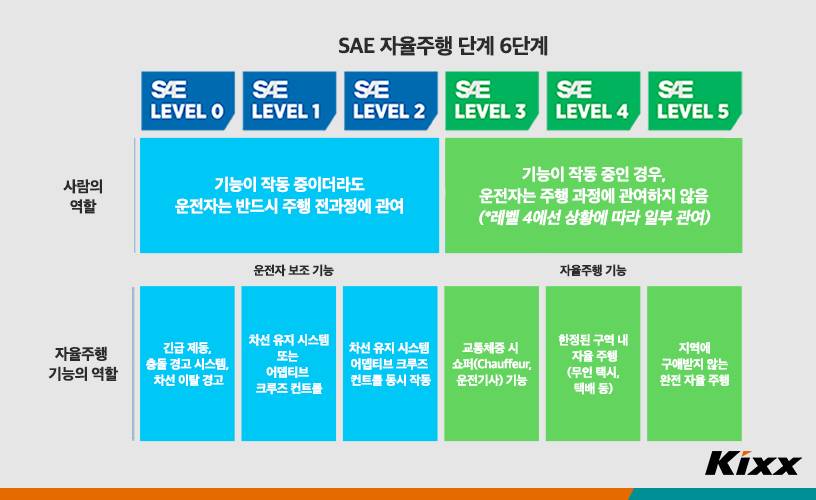
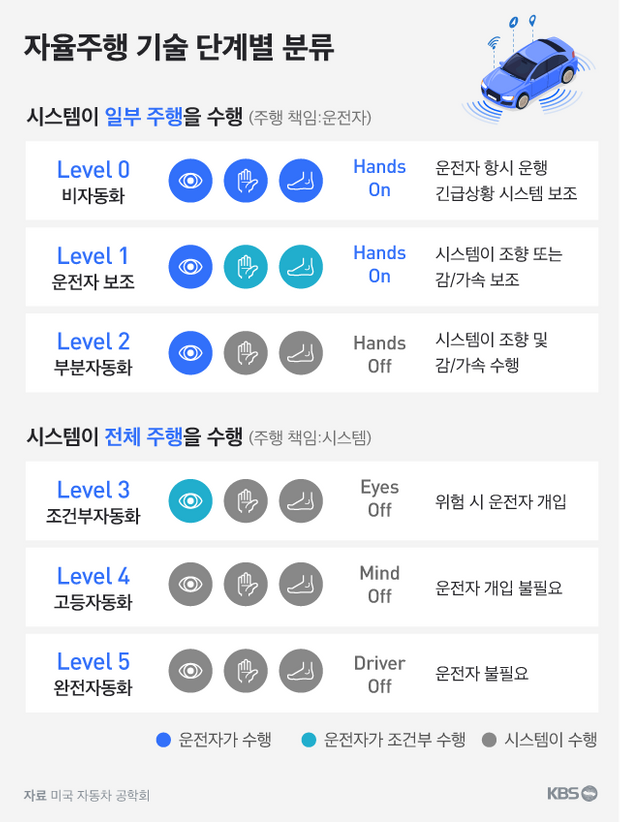
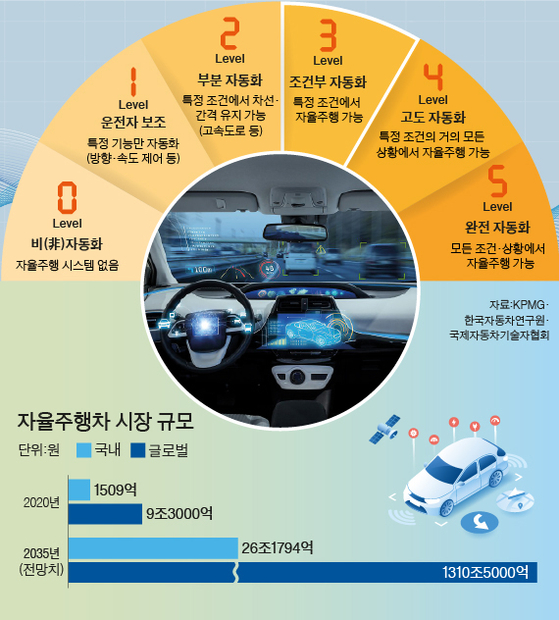
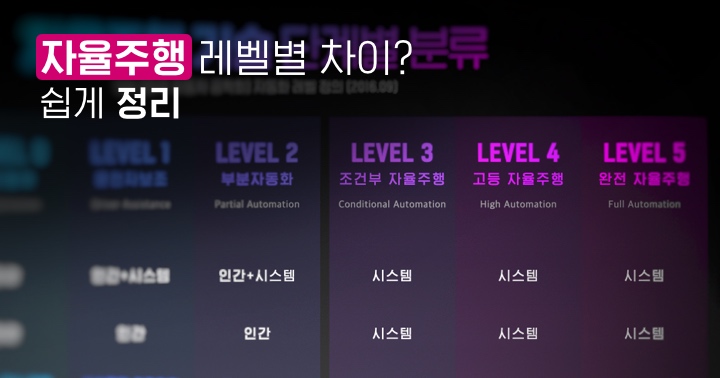
□ 설명 연세대 학교 글로벌 융합 공학부 김·시호 교수 지능형 자동차 연구실[Seamless Transportation Lab(STL)]에서는 기아 레이[KIA Ray]에 조향 제어를 포함한 맞춤형 순항 제어[Adaptive Cruise Control(ACC)including Steering Control], 차선 유지 보조[Lane Keeping Assist(LKA)], 신호 인식[Traffic Light Recognition(TR)]을 적용했습니다.본 연구실에서 연구 중인 자동 운전 자동차는 현재 자동 운전 수준 2입니다.적응형 순항 제어(ACC)은 상시 동작합니다.적응형 순항 제어(ACC)는 평소에 규정된 속도를 유지하면서 전방에 차량이 출현했을 경우 해당 차량의 속도에 맞추어 속도를 떨어뜨립니다.조향 제어까지 가능하고 사거리에서 좌회전 및 우회전이 가능합니다.적응형 순항 제어(ACC)은 카메라와 LiDAR를 통해서 전방의 차량을 인지하고 차량과 물체를 구분할 수 있습니다.차량이 아니라 정지한 물체에 대해서는 적응형 순항 제어(ACC)대신 자동 긴급 제동(AEB)및 전방 충돌 경고(FCW)가 작동할 수 있습니다.차량 양쪽에 차선이 있는 경우, 차선 유지 보조(LKA)가 작동합니다.본 연구실의 차선 유지 보조(LKA)는 GPS방식이 아니라 카메라를 통한 방식이기 때문에 직진하고 있음에도 스티어링 휠이 미세하게 흔들리는 모습입니다.(앞으로 스티어링 휠의 흔들림에 관한 부분은 개선할 예정입니다.)영상이 실내의 모습만 담고 있어 외부에 설치된 신호기의 모습은 촬영되지 않았지만 신호 인식(TLR)도 동작합니다.신호 인식(TLR)은 카메라를 통한 방식이며, 차량은 적색 신호(정지), 화살표 신호(좌회전)녹색 신호(직진)을 인식하고 주행합니다.앞으로 황색 신호에 대한 대응 부분을 보강할 예정입니다
인기글

![[11월-4] 기사크리핑(위기의 K콘텐츠, 뉴노멀, 오징어게임, 뮤지컬마케팅, 시청률과 화제성, 무인계산대, 일회용품 규제, 유기동물 입양 활성화, 관람료 유료화)](https://mblogthumb-phinf.pstatic.net/MjAyMzA3MDZfMjE0/MDAxNjg4NjIyOTA2ODAw.aG4J962vV-N3sa9EutM0Fistj0KrdjnbIhvoyybyil0g.EO9Rq_-GbffEjVma0sw2eZtN3flBZaDj9QNqVTQDurYg.PNG.kcc1335/SE-73a77256-069c-4ddf-a721-808306d40ef1.png?type=w800 "[11월-4] 기사크리핑(위기의 K콘텐츠, 뉴노멀, 오징어게임, 뮤지컬마케팅, 시청률과 화제성, 무인계산대, 일회용품 규제, 유기동물 입양 활성화, 관람료 유료화)")

연세대 글로벌융합공학부(글로벌융합기술원) 김시호 교수, Seamless Transportation Lab(STL, 지능형자동차연구실) https://sites.google.com/site/shihoyonsei/ 석사과정 석호